Part II : Special theory of the determinative structure (Nomos) of the material world (Determination of stable patterns)
Sequel to the theory of the true and ultimate determinants (if-then constants) of the material world, together constituting causal chains, causal webs, and the determinative connections in low-level and high-level material processes, now -- that is, in the present document -- with respect to the formation of stable, enduring, repeatable patterns in the material world (space-time world, Explicate Order)
e-mail :
 ( Please write in ' Subject ' entry : ' METAPHYSICS ', in order for me to be able to distinguish your mail from spam )
( Please write in ' Subject ' entry : ' METAPHYSICS ', in order for me to be able to distinguish your mail from spam ) Introduction to, and lay-out of, the theory of special nomological structures of the space-time world, that is, the nomological structures insofar as determining stable, enduring, and repeatable patterns in the space-time world
Introduction.
In the previous document we have proposed a general nomological theory in terms of If-Then constants residing in the Implicate Order but determining things in the Explicate Order (material world, space-time world). We have shown that all discernible dynamical systems of the space-time world are in fact subsystems of the one overall world process (world dynamical system). Every state of such a subsystem is a part of the corresponding world state. Further we have proposed that the last, ultimate, that is, most basic and fundamental, determinative units are If-Then constants residing in the Implicate Order. Each such an If-Then constant consists of an antecedent and a consequent. The antecedent (If term) in turn consists of, or, perhaps better, refers to, a disjunctive set of different conditions, each one of them already on its own fully guaranteeing the appearance of that to what the constant's consequent (Then term) refers. If some specific condition happens to prevail at some location and point in time in the Explicate Order (space-time world), then, if this condition happens to be ' listed ' in some If-Then constant's If term, this If-Then constant (which itself resides in the Implicate Order) will be 'activated', i.e. it applies, meaning that that to which the constant's Then term refers will appear in the Explicate Order. Such an activation of an If-Then constant, itself based in the Implicate Order, (and such an activation) triggered by some state of affairs in the Explicate Order and followed by the appearance of some definite content or form in the Explicate Order, is possible in virtue of injections and projections taking place from one Order to the other.
All this, however, pictures a space-time world in which all discernible dynamical systems (subsystems of the one overall world process) are highly unstable : One particular local condition that happens to prevail somewhere in the space-time world triggers the activation of some particular If-Then constant, leading to the projection (into the Explicate Order) of the content referred to by that constant's Then term, which (content) then itself is a new condition appearing there in the space-time world. And this new condition then triggers the activation of another If-Then constant, resulting in a new condition again, which then activates another If-Then constant, and so on.
In this way a successive series of conditions is seen to appear in the Explicate Order. Each such a condition, however, is just a basic part of a state of the corresponding dynamical system (itself a subsystem of the world system). Every state thus consists of many simultaneous conditions (each one of such conditions triggering the activation and application of some If-Then constant). So what we see in the Explicate order is in fact the succession of states of such a dynamical system :
Figure 1 : The application (activation) of sets of If-Then constants constitutes the succession of states of a dynamical system. Some (that is, a number or set of ) If-Then constants are simultaneously activated by a prevailing state (prevailing in the Explicate Order) of the corresponding dynamical system. These activations result in the appearance of the corresponding set of consequents of these If-Then constants, and that means the appearance of the next state of the dynamical system. This next state now consists of a number of simultaneously prevailing conditions, each of them activating some other If-Then constant, resulting in a new set of prevailing conditions together making up the next next state of the dynamical system, and so on.
Each thick blue line stands for a particular state of the dynamical system. The thin extensions indicate that each such state is a part of the corresponding world state (of the world dynamical system).
Each red line segment between two successive system states stands for the application (to the Explicate Order) of a particular If-Then constant (itself residing in the Implicate Order).
Let us call this series of states the dynamical system "A".
Figure 2 :
Lower sequence of states : Dynamical System A.
Upper sequence of states : Dynamical System B.
Dynamical system A is more or less unstable, because when instead of one particular state -- here state An -- of system A, another state -- here state Bn -- very similar to state An, but not identical to any possible state of dynamical system A, happens to prevail, then an altogether different set of If-Then constants will be activated as would be the case when state An prevailed. This implies that we get a different sequence of states, different from the sequence of dynamical system A, that is, we now have to do with another dynamical system -- let us call it B -- going its way, instead of the dynamical system A, and the end result will accordingly be different.
So the dynamical system A is unstable because a small deviation in the prevailing state results in an altogether different dynamical system going its way, instead of the original one. And the picture of the nomological structure ( = determinative structure) of the space-time world as sketched in the previous document implies that in the same way all dynamical systems, occurring there as subsystems of the one world system, would -- like dynamical system A -- be unstable.
Origin of stable dynamical systems in terms of changing If-Then constants.
In order to let our nomological theory account for the presence of such dynamical systems we must make some concessions : While in the original theory (previous document) we only assumed a determination of things from the Implicate Order to the Explicate Order, we now must assume that in addition to such determination there is also a determination in the other direction, that is from the Explicate Order to the Implicate Order, which means that the latter Order can be partly changed or influenced by what happens in the Explicate Order. And what this in turn means is that a number of If-Then constants -- as they reside in the Implicate Order -- can be changed as a result of what happens in the Explicate Order. For this to understand, let us first recall how the determination of things in the Explicate Order by the activation and application of If-Then constants goes its way. For this we repeat Figure 8 of the previous document :
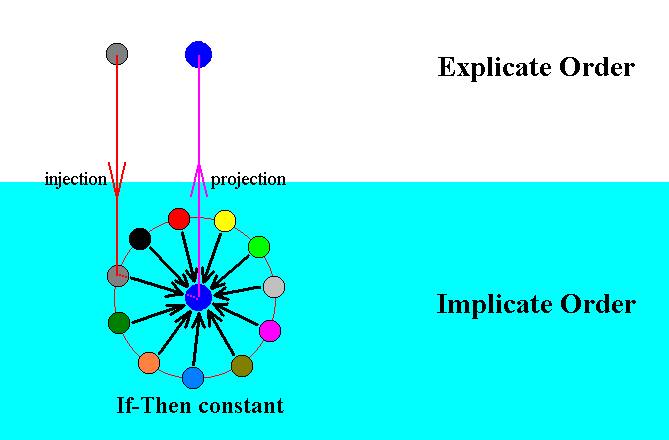
Figure 3 : ( = Figure 8 of previous document) Activation of an If-Then constant.
One of the sufficient grounds or conditions, as listed by the If term of the constant, happens to exist in the Explicate Order. As a formal content it is then injected into the Implicate Order and merges there with the formal content of the corresponding sufficient ground as it is present in the If term's 'list', because these contents are formally identical. The If-Then constant is now activated, which here means that the formal content of the constant's Then term is projected into the Explicate Order and thus becoming spread out (that is, unfolded) along this Order's space and time dimensions.
However, before we describe the formation of a stable dynamical system from an unstable one in terms of changing If-Then constants we first describe it macroscopically :

Figure 4 : A segment of the trajectory of dynamical system A. The trajectory consists of a number of consecutive system states of which eight are indicated : An-1, An, An+1, An+2, An+3, An+4, An+5 and An+6.
Now we have to consider the following : If the initial state or any intermediary state of system A happens to appear, in the Explicate Order, repeatedly (that is, appearing on several or even many occasions), then the whole sequence of states of system A coming after this state will repeatedly appear with it. We see this for example when many individual snow crystals are formed in a blizzard. Therefore it must be so that the corresponding determinative chain in the Implicate Order is repeatedly activated : In the Explicate Order a system state consists of a great many conditions -- or one might say subconditions. Each such condition, when it actually prevails in the Explicate Order, triggers the activation of that particular If-Then constant where this condition is ' listed ' (among other conditions) in its If term. The content of the constant's Then term will then appear in the Explicate Order and will constitute a new condition which in turn triggers the activation of a new If-Then constant, namely that constant whose If term has this new condition in its ' list ', and so on. In this way we have a successive activation of If-Then constants. But because every system state consists of a lesser or greater number of (simultaneous) conditions, a corresponding number of If-Then constants will be activated, and this means that we have, say in dynamical system A, not one series of successive activations of If-Then constants, but a bundle of such series. The next Figure illustrates this.
Figure 5 : Some successive states of dynamical system A. State An is highlighted.
Every system state consists of a number of different conditions (subconditions, partial states) indicated by black dots. A red line between any two immediately consecutive dots symbolizes the activation and application of an If-Then constant whose If term contains in its 'list' the condition referred to by the first of these two black dots.
Several sequences of successive applications take place in this way. Six such sequences are drawn.
So, following our example, we have a bundle of six sequences of application of If-Then constants. And correspondingly we have in the Implicate Order a bundle of six sequences of activation of those same If-Then constants.
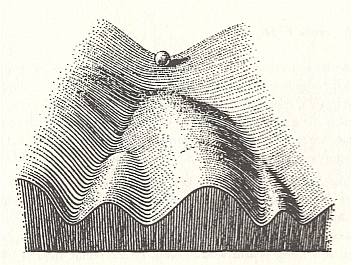
Figure 5a : Several (sub)chreodes as canalized pathways of change. The chreodes correspond to the valleys, and lead to more or less particular developmental end-points. The successive positions of the ball stand for the successive states or substates of a dynamical system. Depending on prevailing conditions the system will follow one (sub)chreode or another. According to the ideas developed here, the chreodes reside in the Implicate Order, but, of course, not in a spatial form.
(After WADDINGTON, 1957 (and reproduced in SHELDRAKE 1988))
And naturally, when the valley is not deep enough or the perturbation is too strong, the system will deviate, and will not regain its original course. And also, before the chreode was formed at all, the system was unstable : when then some state had popped up, which although very similar to the corresponding potential state of system A, was nevertheless different from that state, we would see a different dynamical system -- let us call it dynamical system B -- that is, different from dynamical system A, going its way.
Now we must investigate how precisely such a chreode or valley is formed in the Implicate Order (from an initially flat but slightly sloping 'landscape') completely in terms of If-Then constants, which we believe to be the ultimate and most basic determinative entities.
Let us begin with four dynamical states. One state is state An, which is a state of dynamical system A. The second state to be considered lies on the same world state but is slightly different from the first one. It is state Bn which is a state of dynamical system B. The third state is state An+1 which is a state of dynamical system A and which comes next to state An. The fourth state to be considered is state Bn+1 which is a state of dynamical system B and which comes next to state Bn :
Figure 6 : A sequence of consecutive states of dynamical system A, and a sequence of conscutive states of dynamical system B.
Each state consists of a number of conditions, and each condition triggers the activation an If-Then constant in the Implicate Order leading to its application (red line) in the Explicate Order.
Four states are highlighted : An, An+1, Bn and Bn+1.
Each system state activates many different If-Then constants simultaneously.
Figure 7 : The four highlighted system states of the previous Figure, An, An+1, Bn and Bn+1.
Of each of these system states only one condition is highlighted :
Condition p in system state Bn,
Condition q in system state Bn+1,
Condition r in system state An,
Condition s in system state An+1.
Condition p triggers the activation and application (red line) of the If-Then constant ALPHA, resulting in the condition q,
Condition r triggers the activation and application (red line) of the If-Then constant BETA, resulting in the condition s.
The If-Then constant ALPHA could look like this :
Figure 8 : The If-Then constant ALPHA.
If one of the conditions listed in the If term (discs drawn on a circle) happens to exist in the Explicate Order, then the If-Then constant ALPHA is activated and applied, and the condition q appears in the Explicate Order. And thus, more specifically, when condition p happens to exist in the Explicate Order, the If-Then constant ALPHA is indeed activated and applied, resulting in the condition q appearing in the Explicate Order.
The If-Then constant BETA could look like this :
Figure 9 : The If-Then constant BETA.
If one of the conditions listed in the If term (discs drawn on a circle) happens to exist in the Explicate Order, then the If-Then constant BETA is activated and applied, and the condition s appears in the Explicate Order. And thus, more specifically, when condition r happens to exist in the Explicate Order, the If-Then constant BETA is indeed activated and applied, resulting in the condition s appearing in the Explicate Order.
If these two If-Then constants remain what they are, then the existence of condition r of state An of dynamical system A will lead to the appearance of condition s of state An+1 of that same dynamical system A. Further, the existence of condition p of state Bn of dynamical system B will lead to the appearance of condition q of state Bn+1 of that same dynamical system B.
However, things become different when If-Then constants are allowed to change.
Let us first consider If-Then constant ALPHA. We assume that condition p has disappeared from that constant's 'list' of conditions. So the If-Then constant now looks like this :
Figure 10 : The If-Then constant ALPHA after it has changed.
The condition p has disappeared from the If term's disjunctive list of conditions. So when condition p happens to exist in the Explicate Order, it will, at least as it concerns this particular If-Then constant, not lead to the appearance of condition q in the Explicate Order.
Let us further consider If-Then constant BETA. Here we assume that condition p is added to the constant's 'list' of conditions. So the If-Then constant now looks like this :
Figure 11 : The If-Then constant BETA after it has changed.
To the constant's list of conditions the condition p is added. So when the condition p happens to exist in the Explicate Order, then If-Then constant BETA, instead of ALPHA, is activated, leading to the appearance in the Explicate Order of condition s.
Said in a more detailed way : when the condition p, which is a condition lying on state Bn , which state lies outside the series of states of the original dynamical system A, exists in the Explicate Order, it will nevertheless not lead to the appearance of condition q, but to the appearance in the Explicate Order of condition s, which lies on the state -- An+1. And this state belongs to the original series of states of dynamical system A.
And of course, when condition r comes to exist in the Explicate Order (instead of condition p ), the condition s will also appear in the Explicate Order because condition r is still listed in the constant's If term.
So here, as far as one If-then constant is reckoned with, we can say : when a condition (p) deviating from the corresponding condition (r) in state An, and so deviating from the original state series of dynamical system A, appears -- instead of condition r -- in the Explicate Order, the dynamics nevertheless returns to this original series. The system is stable. See next Figure.
Figure 12 : Determinational activity of the original If-Then constants ALPHA and BETA (left half of Figure), and of the changed If-Then constants (right half of Figure). After these constants have changed (as specified above) condition p no longer leads to condition q, but to condition s. And if instead of condition p condition r prevails -- or any other of the conditions listed in the If term of the (changed) BETA constant -- then also condition s will appear in the Explicate Order.
But of course, a system state, that is, any one system state, does not involve only one If-Then constant, but many of them : When one such a system state comes to exist in the Explicate Order, a whole set of If-Then constants is activated and applied. Now if we assume that also these other relevant If-Then constants change in a corresponding way, then indeed, when, instead of state An, state Bn comes to exist, the dynamics nevertheless returns to the original series of states of dynamical system A. Dynamical system A has become stable.
Figure 13 : Determinational activity of original If-Then constants (left half of Figure), and of changed If-Then constants (right half of Figure). The Figure is the same as Figure 12 but now a second pair of If-Then constants is added. We here only consider the second pair. After these two constants have changed (in the same way as the original pair discussed earlier) condition d no longer leads to condition e, but to condition g. And if instead of condition d condition f prevails -- or any other of the conditions listed in the If term of the (changed) If-Then constant -- then also condition g will appear in the Explicate Order.
Having shown the stabilization of the dynamical system (with respect to a single deviating state) in terms of just four If-Then constants, it is clear how to deal with it in terms of the complete set of If-Then constants involved in such a single deviating state, and consequently, at the same time also in terms of all the If-Then constants involved in the complete set of all possible deviating states.
Where does such a deviating state come from? In the context of the original series of states, together forming the original unstable dynamical system, we can say that the deviating state is a local perturbation of that original dynamical system. If for this dynamical system already a chreode has been formed (as a result of alteration of the If-Then constants involved) the system will return from the deviating state to its original series of states, that is the system will recover from the perturbation.
We now will attempt to describe the event of perturbation itself, that is, to describe from where such a perturbation actually came, completely in terms of If-Then constants.
A perturbation of dynamical system A (just to give that system a label) must be seen as a fusion of one particular state of that dynamical system with some particular state of another dynamical system B. At first the systems A and B were running relatively on their own, that is, relatively independently of each other (they are never completely independent of each other), nevertheless they will more or less gradually 'approach' each other, and when they actually meet, or 'collide', their respective system states fuse.
Such a gradual approaching followed by a fusion of two systems might be illustrated with the case of two material bodies moving in space and approaching each other until they meet :
Figure 14 : The encounter of two moving material bodies in space, representing two dynamical systems A and B, as a model of perturbation.
Following this Figure, dynamical system A consists of a successive series of system states, of which state An , An+1 , An+2 , An+3 are depicted. Each such a state is a state or condition in which the material body (pictured by a green disc) finds itself at a certain point in time : namely (1) the velocity ( = speed and direction of motion) of that body at that point in time and (2) its spatial position at that same point in time.
state An and state Bn are (among the many) parts of the world state Wm ,
state An+1 and state Bn+1 are (among the many) parts of the world state Wm+1 ,
state An+2 and state Bn+2 are (among the many) parts of the world state Wm+2 ,
state An+3 and state Bn+3 are (among the many) parts of the world state Wm+3 ,
and so on.
Despite the fact that state An is just a mere part of world state Wn and, also, despite the fact that state Bn (which is simultaneous with An) is also just a mere part of that same world state, these simultaneous states An and Bn are -- ex hypothesi -- relatively independent of each other. Approximately the same goes for the simultaneous states An+1 and Bn+1 , the simultaneous states An+2 and Bn+2 , and the simultaneous states An+3 and Bn+3 , although during this sequence of pairs of states the mutual dependency between every two simultaneous states gradually increases, until, finally, the two states merge into one single state : An+4 + Bn+4 .
The perturbation of dynamical system A by the dynamical system B (which we can also describe as the perturbation of dynamical system B by dynamical system A) is precisely embodied by this fusion of two simultaneous states into one single state. In all this we must realize that the earlier pairs of simultaneous states are, in a way, also fused because they are part of the same world state, but this fusion is fairly weak. In contrast with that, the final fusion (namely that of the states An+4 and Bn+4 ) is not just some loose or weak fusion, but a strong fusion, that is, a complete integration of the two states resulting in one single new state.
What state comes next is totally dependent on this single new state.
In fact we can express things in a more compact way :
Until the point in time corresponding with the production of the simultaneous states An+4 and Bn+4 (and thus corresponding with world state Wm+4 ) we have two dynamical systems, A and B, both consisting of one (moving) material body. So in total we have two (moving) material bodies. But at the point in time corresponding to the world state Wm+4 we have in total only one (moving) material body, because the original two have dynamically fused, and integrated in such a degree that one single dynamic entity embodying one single dynamic state has resulted.
With this model of perturbation in mind, we will now attempt to describe the perturbation of one dynamical system by another in terms of If-Then constants.
For this we must analyze each system state into its many constituent conditions (or subconditions one might say)). These conditions are the 'elements' of a given system state, and each condition triggers the activation and application of precisely that particular If-Then constant whose If term's list contains (among many other possible conditions) that particular condition.
First we picture the two dynamical systems -- we call them C and D -- as successions of not yet analyzed system states :
Figure 15 : Two dynamical systems on their way to mutual interaction, here described as the perturbation of system C by system D. Only unanalyzed states (thick blue amd thick red line segments) are given here. Every pair of simultaneous states belongs to the corresponding world state ( This relation is indicated by the thin blue lines). The systems gradually approach each other, meaning that they become more and more dependent upon each other. Finally, when this dependency has become maximal the two corresponding simultaneous states coalesce, resulting in one single new state (purple thick line segment).
This situation can be described in a more detailed way, when we analyze the states into their respective constituent conditions. A system state consists of many such conditions. Two of them are depicted in the next Figure.
Figure 16 : Initially, two dynamical systems, C and D, distinguish themselves not only from the general background of the one overall world process of which they are a part, but also from each other. The overall world process consists of a single linear series of world states, and a short continuous segment of this series is depicted in the present Figure, that is the world states : Wn-1 , Wn , Wn+1 , Wn+2 , Wn+3 and Wn+4 . And so initially, any two simultaneous system states, namely one of dynamical system C and the other of dynamical system D (both system states lying on the same world state) are relatively independent of each other. But, as the systems proceed, their simultaneous states, as to how they will be, become more and more dependent upon each other because they will increasingly influence each other. Finally, the two simultaneaous states produced by those on world state Wn+3 merge into one single system state lying on world state Wn+4 .
All this can be expressed in more detail when we consider it in terms of If-Then constants. :
Each existing system state consists of many simultaneous conditions, and each condition triggers the activation and application of that particular If-Then constant (which itself resides in the Implicate Order) which has this condition listed in its If term. Then the content of the constant's Then term will be projected, that is to say, it appears as one of the constituent conditions of the next system state. This condition will in its turn trigger the activation and application of another If-Then constant, and so on. In this way we have a linear series of applied If-Then constants. But because a system state contains not only one, but many constituent simultaneous conditions, we get, instead of one linear series, a bundle of such series. And it is this bundle that constitutes the succession of system states. In the present Figure we consider -- for simplicity's sake -- only two such series :
So in the state of dynamical system D which lies on world state Wn-1 we consider two constituent conditions, namely condition a and condition b.
Condition a happens to occur in the disjunctive list of the If term of a certain If-Then constant. This constant will then be activated and applied, leading to the appearance of the content of the constant's Then term in the form of a constituent condition, namely condition d, of the next system state lying on world state Wn . This new condition in turn triggers the activation and application of another If-Then constant, leading to the appearance of condition f of the next system state (still of dynamical system D), and this condition will in turn trigger an If-Then constant, leading to the appearance of condition h on world state Wn+2 . In the same way, the other condition, lying on that same first considered system state (itself lying on world state Wn-1 ) of dynamical system D, namely the condition b (see Figure), triggers the activation and application of its appropriate If-Then constant, leading to the appearance of condition c on the next system state (itself lying on world state Wn ) of that same dynamical system D. And this condition in turn triggers the activation and application of its appropriate If-Then constant, leading to the appearance of condition e, which will, in the same way lead to the appearance of condition g on that same world state Wn+2 on which condition h lies.
Again, in the same way things go in dynamical system C : (see Figure)
Condition o happens to occur in the disjunctive list of the If term of a certain If-Then constant. This constant will then be activated and applied, leading to the appearance of the content of the constant's Then term in the form of a constituent condition, namely condition q, of the next system state lying on world state Wn . This new condition in turn triggers the activation and application of another If-Then constant, leading to the appearance of condition t of the next system state (still of dynamical system C ), and this condition will in turn trigger an If-Then constant, leading to the appearance of condition v on world state Wn+2 . In the same way the other condition on that same first considered system state (itself lying on world state Wn-1 ) of dynamical system C, namely the condition p (see Figure), triggers the activation and application of its appropriate If-Then constant, leading to the appearance of condition r on the next system state (itself lying on world state Wn ) of that same dynamical system C. And this condition in turn triggers the activation and application of its appropriate If-Then constant, leading to the appearance of condition s, which will, in the same way lead to the appearance of condition u on that same world state Wn+2 on which condition v lies.
Now we stand before the transition to the next system states both lying on world state Wn+3 . This takes place in the same way as did the foregoing transitions (see Figure) :
Condition g leads (as described) to condition i of the next system state.
Condition h leads (as described) to condition j of the next system state.
Condition u leads (as described) to condition w of the next system state.
Condition v leads (as described) to condition x of the next system state.
And now we finally have arrived at the transition in which the two simultaneous system states lying on world state Wn+3 merge, resulting (in the next world state) in one single system state. And, as has been said, this is accomplished in the next world state, that is, in world state Wn+4 . Further, considered as (just) an imagined intermediate phase in this transition we have let the corresponding If-Then constants do their job in the usual way. That is, although now only one single system state is going to be formed (out of two), this one imagined intermediary phase simply consists of the corresponding consequences of the respective earlier conditions. And these new conditions are : k, l, y, and z, which were respectively produced (in the way described above) by the earlier conditions i, j, w, and x, all lying on world state Wn+3 . This new single 'state' was depicted as :
But this 'state' is, as has been said, only an imagined 'intermediary phase'. It will not as such exist, because as soon as the constituent conditions (in our example, k, l, y, and z ) become part of one single system state (instead of two) they do not stand on their own anymore : they will, as to the determination of their specific content, heavily involve each other, or, said differently, they will be fully integrated into the whole of the single system state, as is indicated in Figure 16. So the true genuine system state lying on world state Wn+4 , and produced by the two earlier system states lying on the previous world state Wn+3 , is (as indicated in Figure 16 ) :
This symbolizes the integration of four simultaneous conditions ( k, l, y, and z ) , resulting in the two conditions ky and lz (as constituent conditions of the one system state lying on world state Wn+4 ). Compare with Figure 14. The production of new conditions followed by their subsequent integration (as was just described), and with it the production of one single system state out of two simultaneous earlier system states, constitutes the perturbation of the dynamical system by another. Such a perturbation either results in a permanent deviation of the original course or trajectory of the perturbed dynamical system, or, when the system is stable and the perturbation not too strong, in a return of the system to its original course or trajectory.
This concludes our discussion of the phenomenon of perturbation in terms of If-Then constants. The description given here of perturbation deviates more or less from the one given in the previous document (See there Figure 3a). Both versions we retain, because they stimulate further pondering.
After having considered the formation of stable dynamical courses out of unstable ones by assuming alterations of certain If-Then constants, where the stability of the dynamical course means that the system, after not too strong a perturbation and, as a result of the latter, after deviating from its proper course, will quickly resume this course again, we now will reflect on the changes that have been made in the general theory of If-Then constants (as given in the previous document) that were considered necessary to make these phenomena possible.
We have now discussed the formation of stable dynamical systems in terms of If-Then constants and chreodes, and we have discussed perturbation (from which a stable system can recover) in terms of If-Then constants.
e-mail :
( Please write in ' Subject ' entry : ' METAPHYSICS ', in order for me to be able to distinguish your mail from spam )
To continue click HERE for further study of the determinative structure of the World, Part III.
Back to Aristotelian metaphysics Part I
Back to Aristotelian metaphysics Part II
Back to Aristotelian metaphysics Part III
Back to Aristotelian metaphysics Part IIIa
Back to Aristotelian metaphysics Part IV
Back to Aristotelian metaphysics Part V